Genesis AI Releases Nyx, Quadrants, and Genesis World 1.0 Physics Platform for Scalable Robotic Foundation Model Evaluation

Genesis AI released Genesis World 1.0. The platform consists of four components: the Genesis World physics engine, Nyx (a real-time tracked renderer), Quadrants (a Python-to-GPU compiler), and a simulation interface. It is designed to accelerate the development of a robotics foundation model through simulation-based simulation.
Robot model development has two constraints: data and iteration speed. The field is very data oriented. Genesis AI counters a slow, under-discussed bottleneck in the model development cycle itself – specifically, how quickly teams can evaluate candidate policies and compare modeled test points.
What Problem Does This Solve?
A typical policy test in Genesis consists of hundreds of tasks with hundreds of sections each. Running that in the real world requires more than 200 hours of continuous robot operation with one operator and one robot station – just to get one test pass. Statistically meaningful comparisons across checkpoints require multiple such passes.
Genesis World 1.0 runs the same test in less than 0.5 hours, with no humans or hardware in the loop and slightly more consistent results across runs. That's about two orders of magnitude faster than real-world testing.
The research team deliberately chose to prioritize testing before using simulation in training to generate data. Their reasoning: if training and testing share the same simulated distribution, performance improvement may reflect a tighter fit to the dynamics of the simulator than a truly better model. Keeping the two pipes separate produces a cleaner signal.
The research team describes this test method as zero shot real-to-sim: Simulation-analyzed policies are specifically trained on real-world data. No simulated data goes into pre-training.
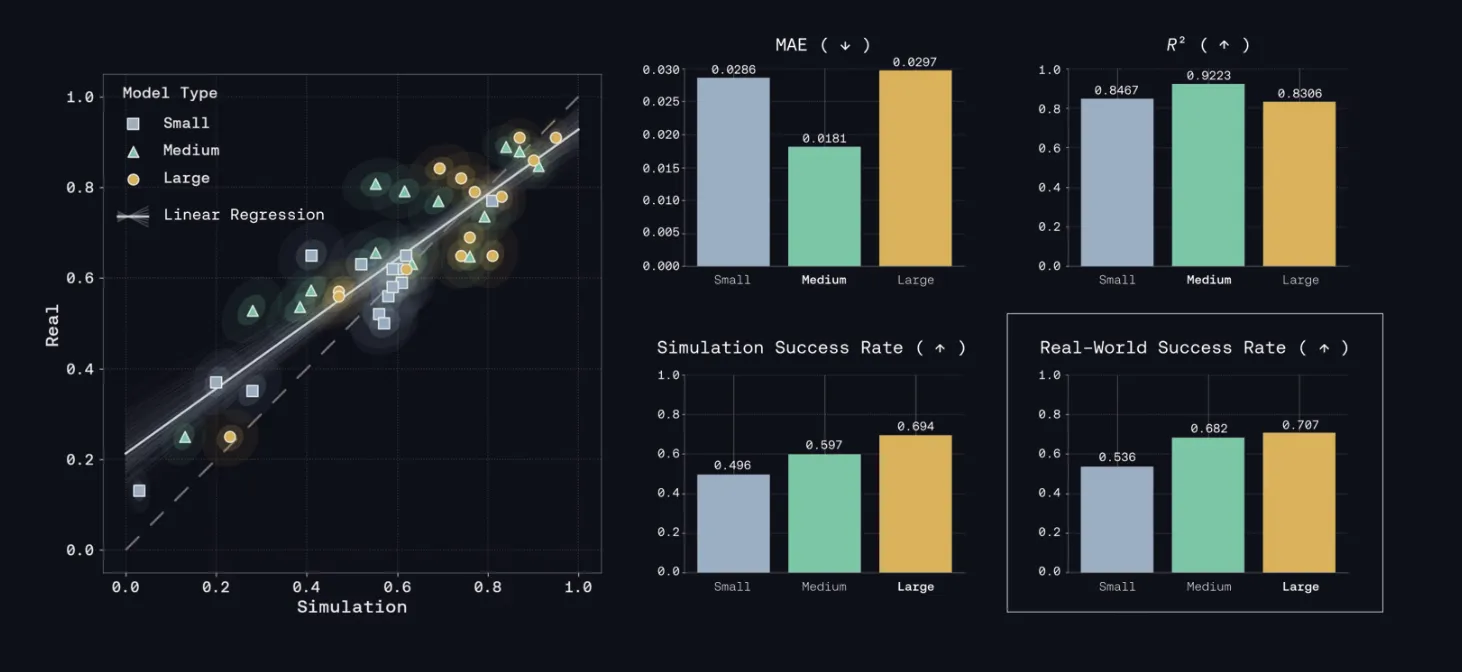
Sim-to-Real Correlation Results
The Genesis research team reports a Pearson correlation of 0.8996 (95% CI: [0.7439, 0.9314]) between simulation and hardware output. Testing includes three different models (Small, Medium, Large) across 14 tasks with 200 episodes per task. The research team used 1,000,000 bootstrap iterations to estimate confidence intervals.
Mean Maximum Violation (MMRV) – a proposed metric in SimplerEnv – was 0.0166 (95% CI: [0.0102, 0.0474]). A low MMRV means that the simulator maintains the relative performance level of the different models.
To test where the sim-to-real differences come from, the Genesis team built a real-time side-by-side rig. It runs the simulator and the virtual robot in parallel from the same startup. The observations – camera frames and relevant detections – can come from the simulator, the robot, or a combination of the two. Changing one source at a time distinguishes whether the difference is from physics, supply, communication, or control.
After this work, their real gap is there 45% lessmeasured by the FID score in their dataset, rather than the next best match.
The Four Lands of Genesis 1.0
Nyx — A Real-time Tracked Route Rendering
Nyx is a GPU-accelerated tracking system that connects to Genesis World as a camera sensor. Available as gs-nyx-plugin A Python package. The pre-built wheels are available for x86-64 Linux (manylinux 2.34+) and Windows 10/11, and require an NVIDIA GPU with CUDA.
Nyx targets 1080p frames with no noise in between 4 ms or less on a high-end, non-baking and ghost-free consumer GPU. To achieve that goal, it uses a display buffer, GPU-driven non-binding, MSAA, hardware ray tracing, hardware matrix cores, and video compression.
Path tracking is a start: lots of bounce light, soft shadows, and indirect light are fine by composition. A physically based camera model sits at the top. The HDRI pipeline illuminates scenes with limited brightness. Assets come from indoor scanning and photogrammetry. 3D Gaussian splats extend coverage when mesh reconstruction is insufficient.
Nyx is driven by batched physics instead of execution per scene. This allows thousands of parallel outputs – each with its own position, lighting, and camera trajectory – to pass through a single integrated rendering pipeline.
Genesis World Physics – Integrated Multi-Physics Engine
The Genesis World physics platform is open source (Apache 2.0) and uses multi-physics in a single pipeline: articulated rigid bodies (MJCF/URDF/USD), FEM for deformation and elastic deformation, MPM for granular and elasto-plastic materials, SPH for fluids, and PBD for fast cloth and surface-based fluids.
Three interchangeable couplers are available behind the same scene API: a quick general purpose coupler; Drake Semi-Analytic Primal style coupler with hydroelastic connection; and Incremental Potential Contact (IPC) for cross-sectional contact in collapsible surfaces. Switching between pairs requires a single line of code change, with no changes to the properties, sensors, or policy interface.
Genesis World 1.0 introduced two new solvers. I Foreign Language Limitation (built on top of libuipc) embeds joint-space dynamics directly into the IPC optimization, so that joint-space dynamics and contact dynamics are solved simultaneously rather than staggered across separate solvers. The second says unconstrained elastodynamicswhich replaces the logarithmic constraint of IPC with a customized Lagrangian. The standard IPC barrier makes the Hessian ill-posed as the contacts become stiffer. The improved Lagrangian formulation avoids this, allowing all contact pairs returned by continuous collision detection to immediately enter the active set. The research team reports until 103× faster performance than native IPC in difficult scenes, with free guarantees preserved.
Additional improvements: new sensors (point-cloud tactile, temperature-grid, proximity), Implicit FEM with Newton + CG solver, and extended material support (URDF xacro, MuJoCo General actuators, composite/simulated joints, fit/weld parameters).
Quadrants – Python-to-GPU Compiler
Quadrants includes a GPU-accelerated physics simulation platform, developed by Genesis AI and released under Apache 2.0. The scripts are written in plain Python and JIT-compiled on NVIDIA CUDA, AMD ROCm, Apple Metal, Vulkan, and x86/ARM64 CPUs with LLVM. Forked from Taichi in June 2025. The name refers to the Chinese philosophical saying that Taichi reveals the Four Forms (The quadrants).
Important performance improvements over the Taichi River: coming 4.6× faster runtime in Genesis manipulation benchmarks and rendering benchmarks. Warm cache startup time single_franka_envs.py it dropped from 7.2 seconds to 0.3 seconds — more than that 10× Hurry up. Inverted mode autodiff is now a first-class resident on all backends, making diff simulations portable.
Physics steps are recorded as a single kernel graph, eliminating the delay in the execution of each step. Independent characters run parallel to the stream. Dense linear algebra (Cholesky factorization, triangular solutions) consists of 16×16 code paths blocked by tiles. The perf-dispatch layer displays the kernel variant on the first call and stores the fastest selection for each signature. Tensors share device memory with PyTorch via DLPack with zero-copy interop.
Installation:
Simulation interface
The fourth component is the simulation interface: a tool that integrates the physics engine, renderer, and composite into a usable system for downstream robotics applications. This includes a photogrammetry pipeline for creating digital twins, an automated pipeline for generating structured environments (scene layout, asset selection, task specification, and success metrics), and different environments that include multi-robot configurations.
Assessment Framework
An examination of Genesis frameworks as a taxonomy of orthogonal perturbation axes in nearly all 10 dimensions, following the outline in “A Taxonomy for Evaluating Generalist Robot Manipulation Policies“:
- Visible: lighting conditions, camera interference, background changes
- Conduct: a combination of intangibles, placement variations, robot positioning
- Semantic: redefining language, order of subtasks, camera view
For each axis, one parameter is varied while all others remain at small values. The research team defines resilience on a given axis as the relative performance maintained under disturbance compared to a smaller, undisturbed setting. Disturbance sweeps for training test points in multi-model simulations require thousands of test plots for each data point. This scale is only possible because simulation tests run without hardware.
Key Takeaways
- Genesis World 1.0 has four components: Nyx (renderer), Genesis World (physics), Quadrants (compiler), and the simulation interface.
- The simulation test achieves a Pearson correlation of 0.8996 with hardware output across 14 tasks and 200 episodes each.
- Policies are trained only on real-world data; no simulated data goes into pre-training (zero-shot real-to-sim).
- The barrier-free elastodynamics achieves speeds up to 103× higher than standard IPC in tough contact scenes.
- Quadrants achieves up to 4.6× faster runtime compared to upstream Taichi, with warm cache startup dropping from 7.2s to 0.3s.
GitHub Repositories:
Also, feel free to follow us Twitter and don't forget to join our 150k+ ML SubReddit and Subscribe to Our newspaper. Wait! are you on telegram? now you can join us on telegram too.
Need to work with us on developing your GitHub Repo OR Hug Face Page OR Product Release OR Webinar etc.? Connect with us

Michal Sutter is a data science expert with a Master of Science in Data Science from the University of Padova. With a strong foundation in statistical analysis, machine learning, and data engineering, Michal excels at turning complex data sets into actionable insights.



